
数控木工雕刻机机器人的控制系统
数控木工雕刻机的雕铣机器人的控制系统是一个多变量非线性、强耦合的控制系统,其动力学方程的建立与计算需要花费大量的时间,这使得机器人的实时控制变得较为困难,为了提高机器人控制系统的运行速度和处理能力,对该系统采用分层递阶智能控制模式。如图1所示:
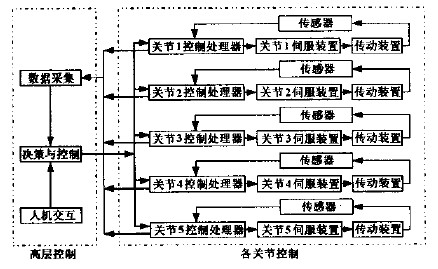
沐鸣2图1 数控木工雕刻机机器人控制系统层次结构框图
数控木工雕刻机的雕铣机器人的高层控制采用高性能的微型计算机Pentium586实现,主要任务有两个:一是负责系统初始化、人机交互、系统诊断和错误报告、组织管理,完成机器人的路径规划,并将机器人末端执行器笛卡尔坐标转换为关节坐标,向各关节控制器(单片机)发出控制指令,并将运算出的各关节运动信息数据送到公用RAM中,同时接收各关节控制器(单片机)返回的反馈数据为下一步控制提供依据,这是普通机器人所共有的;二是完成雕刻图像或图形的模式识别,提取雕刻风格和特征,这是数控木工雕刻机雕铣机器人所特有的。各关节的伺服控制选用8098单片机,该级单片机主要完成接收主机发给的位置运动控制指令,完成关节的轨迹插补,负责数控木工雕刻机的雕铣机器人具体运动的动作的实施,并接收关节运动数据,对关节伺服系统进行实时控制。5块单片机控制器的硬件结构完全一样,可以实现整体系统的通用化、标准化、模块化,增加系统内部的可互换性,并且可以实现在某种程度上的冗余,提高系统的可靠性主机与五片单片机之间,通过公用RAM来互通数据和控制命令。数控木工雕刻机的雕铣机器人的控制系统的硬件结构如图2所示,其中设置截流保护电路和延时保护电路是为了提高系统工作的可靠性。

图2 数控木工雕刻机机器人控制系统硬件结构图
上一篇:数控木工雕刻机的机构运动学分析
下一篇:数控雕铣机床的工作原理及加工过程
推荐产品

数控加工中心YF-C850 此机型的整体机械机构采用树脂砂铸件制造,内部加强筋加多加大高刚性设计,加强机械精度的持久性及加工精度的稳定性,并保证了整体长久不变形。该机型具有自动换刀装置及三轴、四轴联动控制功能,系统一次装夹, 可自动连续对四面进行铣、钻、铰及丝攻等多种

高速精密雕铣机YF-G660 此款机型结合了以往轻重型机器的各种性能优点,采用低床身和立柱横梁一体的设计结构, 再配套高性能和大功率的伺服电机,高精度和超规格的丝杆、导轨,高转速和高精度的主轴,使得机床具有稳定性好、刚性强、加工平衡、加工精度高等功能特点。该机是一款专为

高速数控龙门铣YF-D2516 该型号龙门雕铣机床采用了大型肋骨强化和龙门式大床体设计,并经过多次实效处理消除应力,能长久的保持良好的刚性和精度。该机型是专为加工大工件所设计,其填补了目前市场上普通雕铣机无法加工大尺寸工件的空白。其具有的传动平稳、刚性高、机型重、精度高、

龙门数控高速铣YF-D1311 本型号数控高速铣床采用合理的结构强度及内部加强肋的搭配,并在横梁上增加一根X轴向的导轨,提供机械之整体的高刚性,增强了在切削加工时的稳定性。再配备高精度的进口直线导轨、丝杆和主轴,使该机型的性能既可用于雕刻也可以用于雕铣,同时也起到了特定加
