
沐鸣2系统的系统原理
沐鸣2机械有限公司开发的数控系统是采用DSP(Digital Signal Processor)多轴运动控制器为下位机、工控PC机为上位机的双CPU结构的技术。PC机承担非实时任务的处理,实时任务则采用具有高速浮点运算功能的DSP来处理。这个特点支持客户根据控制任务的具体要求来重新创建各种高级控制算法、操作界面等。在软体上该系统提供与MasterCAM软件的接口,支持DNC加工,HTTP和SMTP等网络协议,能够自动接收和处理电子邮件加工程序文件,是自主开发的高性能的数控系统。考虑到在加工过程中对速度、精度以及操作过程中实时的轨迹跟踪和断点记忆等均有较高要求,课题组采用自主开发的基于DSP技术的MCT8000控制卡,并设计了相应的硬件和控制软件。
1.系统硬件结构
整个系统的组成如图1所示,主要包括工业PC机、控制面板、MCT8000多轴运动控制卡及其接口板、电源、伺服放大器和电机、继电器以及一些安全和保护电路。其中工业计算机处理控制中的非实时任务、实时任务由MCT8000运动控制卡处理,而电源、伺服放大器和电机、继电器则作为系统的执行机构。

图1 系统硬件结构图
Fig.1 System hardware configuration
2.运动控制卡原理
MCT8000系列智能运动控制器包括主控制板,接口板以及控制软件等,是新一代开放式结构高性能可编程运动控制器。其CPU采用美国德州仪器的TMS320C3140MHzDSP,可通过ISA或PCI标准总线或USB高速接口与主控机连接。主控机与控制器之间采用双向高速FIFO进行通讯,可提供2~8轴的高速度、高精度伺服控制,主控机可选用任何PC系列微机。和传统的运动控制器产品相比,MCT8000系列产品具有开放式结构,高速度、高精度,网际在线控制,多轴同步控制,可重构性,高集成度,高可靠性和安全性等特点。
MCT8000在设计上采用了先进的软硬件重构技术,根据控制对象的不同可对系统进行在线设置和重构,或通过软件升级硬件。能够根据客户的不同要求,可对控制器的硬件模块进行最佳调整,配以相应的BIOS,使用户可以对MCT8000的I/O口直接操作。
沐鸣2 MCT8000提供了一整套运动控制函数,包括BIOS函数库(直接操作MCT8000的所有I/O)、基本运动函数库(1~3维的运动插补和运动控制函数)、扩展运动函数库(机器人运动学模型和智能PLC代码翻译器等)和网际在线控制器(基于TCP/IP的点对点安全通讯协议)。
沐鸣2 运动控制板结构图如图2所示。
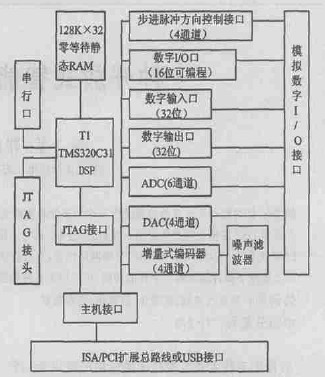
图2 运动控制板结构图
Fig.2 Structure of motion control card
上一篇:开放式智能化数控系统
下一篇:数控技术应用行业的背景
推荐产品

CNC高速龙门铣YF-D1190 此型号机床采用了合理的结构强度和内部加强肋的搭配,并在横梁上增加了一根X轴向的导轨,提高了机床整体的刚性,增强了机床在切削加工时的稳定性。再加上配备的高精度进口直线导轨、丝杆和主轴,使得该机型的性能大大提升,既可以用于雕刻也可以用于雕铣,同

数控龙门高速铣YF-D1615 该款型号高速铣床是本公司对原有机型改造创新升级后推出的第一款主打产品,它结合了原有的老款数控铣床的性能特点,更改了有效行程,并不断的进行创新和改良,才有了这款具有结构合理、稳定性强、精度高、刚性强、效率高等众多优势的产品。该款机型是沐鸣2

高速数控龙门铣YF-D2516 该型号龙门雕铣机床采用了大型肋骨强化和龙门式大床体设计,并经过多次实效处理消除应力,能长久的保持良好的刚性和精度。该机型是专为加工大工件所设计,其填补了目前市场上普通雕铣机无法加工大尺寸工件的空白。其具有的传动平稳、刚性高、机型重、精度高、

高速精密雕铣机YF-G660 此款机型结合了以往轻重型机器的各种性能优点,采用低床身和立柱横梁一体的设计结构, 再配套高性能和大功率的伺服电机,高精度和超规格的丝杆、导轨,高转速和高精度的主轴,使得机床具有稳定性好、刚性强、加工平衡、加工精度高等功能特点。该机是一款专为
