
沐鸣2系统的控制卡原理
1、系统硬件结构
整个沐鸣2系统的组成如图1所示,主要包括工业PC机、控制面板、MCT8000多轴运动控制卡及其接口板、电源、伺服放大器和电机、继电器以及一些安全和保护电路。其中工业计算机处理控制中的非实时任务、实时任务由MCT8000运动控制卡处理,而电源、伺服放大器和电机、继电器则作为系统的执行机构。
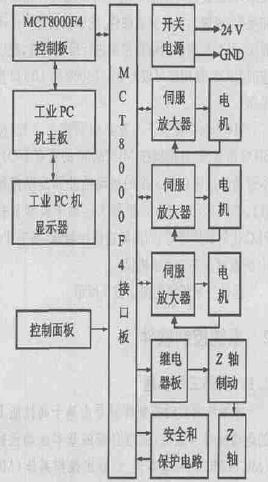
沐鸣2图1 沐鸣2系统的硬件结构图
2、运动控制卡原理
沐鸣2 MCT8000系列智能运动控制器包括主控制板,接口板以及控制软件等,是新一代开放式结构高性能可编程运动控制器。其CPU采用美国德州仪器的TMS320C3140MHzDSP,可通过ISA或PCI标准总线或USB高速接口与主控机连接。主控机与控制器之间采用双向高速FIFO进行通讯,可提供2~8轴的高速度、高精度伺服控制,主控机可选用任何PC系列微机。和传统的运动控制器产品相比,MCT8000系列产品具有开放式结构,高速度、高精度,网际在线控制,多轴同步控制,可重构性,高集成度,高可靠性和安全性等特点。
沐鸣2 MCT8000在设计上采用了先进的软硬件重构技术,根据控制对象的不同可对系统进行在线设置和重构,或通过软件升级硬件。能够根据客户的不同要求,可对控制器的硬件模块进行最佳调整,配以相应的BIOS,使用户可以对MCT8000的I/O口直接操作。
MCT8000提供了一整套运动控制函数,包括BIOS函数库(直接操作MCT8000的所有I/O)、基本运动函数库(1~3维的运动插补和运动控制函数)、扩展运动函数库(机器人运动学模型和智能PLC代码翻译器等)和网际在线控制器(基于TCP/IP的点对点安全通讯协议)。
沐鸣2 运动控制板结构图如图2所示。
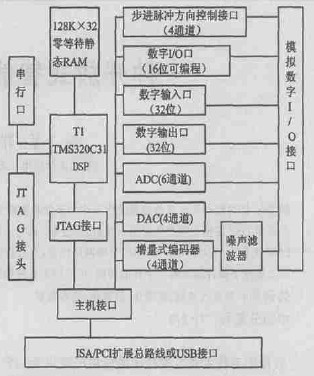
图2 运动控制板结构图
上一篇:沐鸣2系统的原理
下一篇:沐鸣2系统的软件工作机理
推荐产品

CNC高速龙门铣YF-D1190 此型号机床采用了合理的结构强度和内部加强肋的搭配,并在横梁上增加了一根X轴向的导轨,提高了机床整体的刚性,增强了机床在切削加工时的稳定性。再加上配备的高精度进口直线导轨、丝杆和主轴,使得该机型的性能大大提升,既可以用于雕刻也可以用于雕铣,同

数控高速龙门铣YF-D1512 该款型号数控龙门铣床具有精度高、刚性强、结构合理、稳定性好、工作效率高等众多优点,是我公司对老款产品改造升级后推出的一款全新的机型,它结合了原YF-D1615款机型的功能特点,改换了有效行程,并不断的进行改进和创新,该款机型是我们沐鸣2技

高速数控龙门铣YF-D2516 该型号龙门雕铣机床采用了大型肋骨强化和龙门式大床体设计,并经过多次实效处理消除应力,能长久的保持良好的刚性和精度。该机型是专为加工大工件所设计,其填补了目前市场上普通雕铣机无法加工大尺寸工件的空白。其具有的传动平稳、刚性高、机型重、精度高、

高速雕铣机YF-D870 本款型号设备秉承了传统机床小刀具加工特点的基础上,结合目前模具切削加工的实际情况,采用加重型和增强型的光机,高精密度的线性导轨和滚珠丝杆,再配套大功率的主轴和伺服电机,使之成为既可用于中小批量的精密零件生产,更可实现大重型的精密模具加工。其
